
Experimental study on a bionic underwater detector
-
摘要: 水下探测器广泛运用于海洋工程装备中,是船舶、潜艇等感知水下环境的主要设备。目前常用的传感器有着探测距离短、消耗功率高、信噪比不足等缺陷,应用受到较大限制。长期以来,仿生学研究为海洋工程装备的设计提供了大量的创新灵感。研究发现,海洋生物中的海豹在水下的捕食和避险等行为依赖于其胡须的特殊结构对水下环境进行感知。本文通过对海豹胡须结构的研究,仿制了海豹胡须型水下探测器,通过水槽试验验证了其水中目标探测能力。在试验中,针对角度、来流速度和探测目标位置等不同工况进行了研究,通过探测器收集到的信号的频谱分析,掌握了海豹胡须型探测器的工作规律。Abstract: Underwater detectors are widely used in marine engineering equipment, which have important functions such as sensing underwater environment for ships and submarines. The currently applied sensors are faced with restrictions such as short detection distances, high power consumption, and insufficient signal-to-noise ratio, by which their large-scale applications are limited. For a long time, bionics research has provided a lot of innovative inspiration for the design of marine engineering equipment. Researchers found that the predation and hedging behavior of harbor seals depends on the perception of the underwater environment by the special structure of their vibrissa. In this paper, through the study of the vibrissa structure, a vibrissa-shaped underwater detector was designed and manufactured, and its excellent underwater target detection capability was verified by experiments conducted in a water tunnel. In the experiment, different working conditions such as angle, incoming flow velocity and detection target position were studied. The spectrum analysis of the signal collected by the detector was used to master the working rules of the vibrissa-shaped detector.
-
Keywords:
- bionic /
- seal vibrissa /
- underwater detector /
- marine engineering /
- spectrum analysis
-
0 引言
海洋装备工作于复杂的海洋环境之中,需要随时对所处的环境进行探测以保证安全,实现工作任务。对水下环境的感知由各类水下探测器实现[1]。目前采用的探测器通常探测距离有限,功耗高而效率低,无法满足实际应用的要求[2-4]。因此,新型水下探测器的研究对于海洋装备事业意义重大。
海洋生物的各色特性为研究者提供了诸多灵感,启发了一系列生物技术与海洋工程交叉学科的仿生学研究的应用。例如,鲨鱼皮肤的独特结构应用在船舶表面喷涂技术中,大大减少了船体在水中航行的阻力[5];仿鲨鱼皮泳衣帮助游泳运动员大幅提高成绩[6];海豚族群间的交流方式启发了声纳系统的开发[7]。海豹在水中经过千万年的进化,发展出了能够感知环境物体产生的尾迹的胡须结构[8-10]。生物学家发现,海豹的胡须在其进行捕食活动时起到至关重要的作用。当有猎物出现在上游时,海豹胡须会产生振动,海豹可以据此判别猎物的存在并进行跟踪。
在现有的研究中[11-13],对海豹胡须的振动响应特性的试验分析较少。本文通过对海豹胡须的三维结构进行仿制,设计了新型水下探测器,并在水槽中进行试验研究,验证了其探测水下环境的可行性,同时通过不同工况的试验对探测器的工作规律进行了探究。
1 试验方法
1.1 试验目的
本试验的目的包括:研究海豹胡须型探测器探测上游扰动信号的可行性;研究探测器在噪声干扰下的工作能力以及影响探测器工作性能的因素。
1.2 实验装置
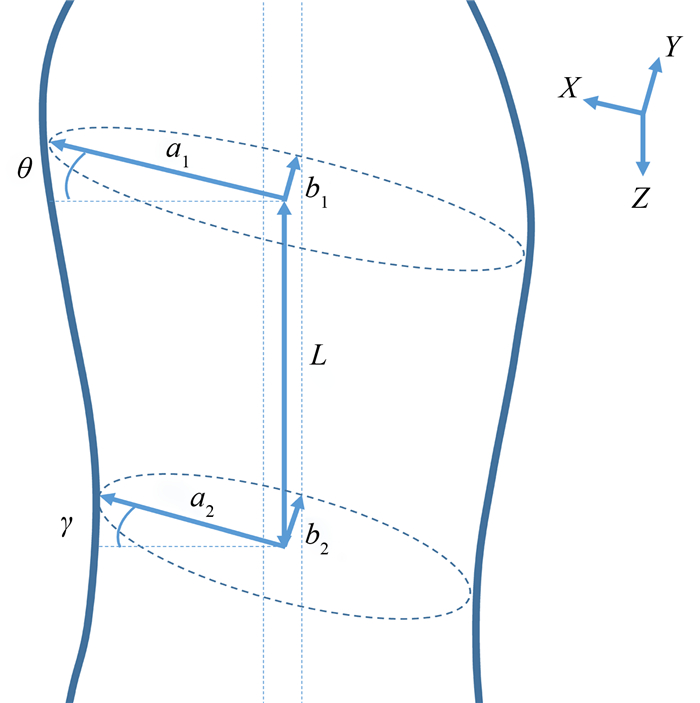
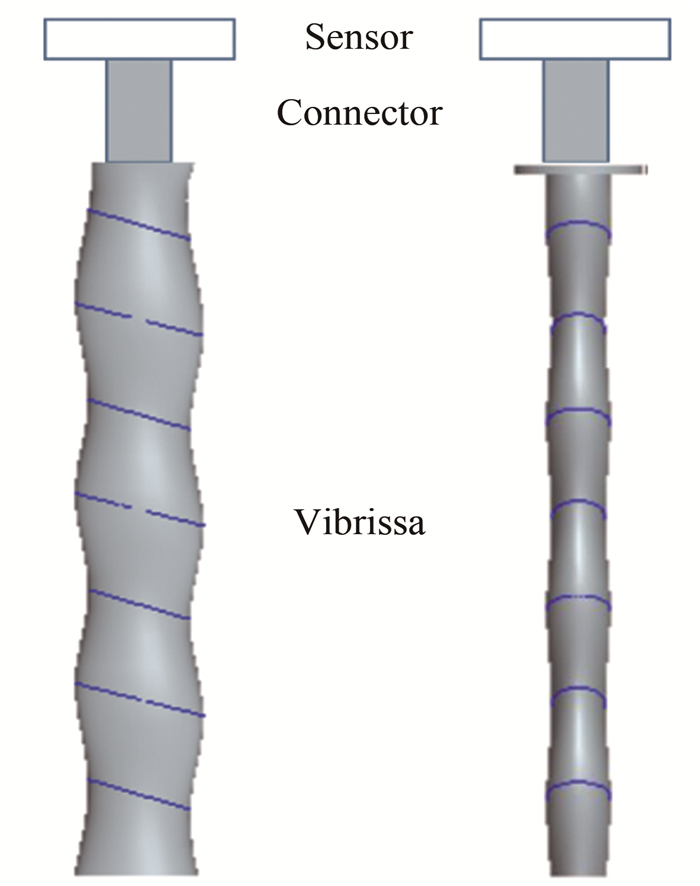
海豹胡须具有复杂的三维结构,其截面形状是系列大小交错的斜椭圆。其他研究者通过对大量海豹胡须的结构进行统计分析设计了理想的海豹胡须模型[14]。如图 1所示,海豹胡须模型的横截面由大小连续变化并呈周期性出现的椭圆构成,大、小椭圆的长轴分别与主轴成一定角度[15]。海豹胡须型探测器由树脂材料经3D打印制成,其关键几何参数如图 2所示,各参数的数值见表 1。作为对海豹胡须型探测器的初步探索,目前使用刚性模型,主要研究表面形状结构的作用,对具有海豹胡须柔性特征的材质模型的研究计划在后续工作中展开。
表 1 探测器外形尺寸参数Table 1 Parameters of detector geometriesθ/(°) γ/(°) L/mm a1/mm b1/mm a2/mm b2/mm 15.27 17.6 31.95 20.7 8.4 16.5 10.2 海豹胡须型探测器通过连接底座固定在ATI公司的Mini40型六轴力/力矩传感器上,传感器线缆通过NI采集器与计算机通信,将采集到的信号数据传输给计算机。
扁圆柱形状的传感器上下两面分别为与试验物体相连的工具侧(Tool side)和固定用的装配侧(Mounter side)。试验中,工具侧与海豹胡须型探测器以及一体打印的连接底座通过螺丝刚性连接,装配侧则固定在刚性台上。在本试验中,探测器在空间3个方向上产生力信号,通过对采集到的信号进行频谱分析评估探测器的性能。在95%置信度下,传感器在X,Y和Z这3个方向的测量误差分别为1.25%,1.25%和0.75%。
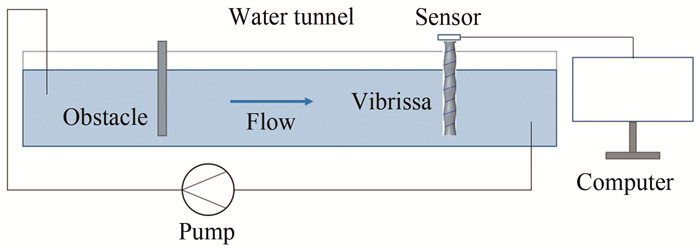
试验装置整体示意图如图 3所示。海豹胡须型探测器竖直安装于循环水槽中,水泵驱动水槽中的水以恒定的速度流动,探测器的上游放置扰流物体(探测目标)。水槽的实验段为长1000 mm的矩形开口段,宽度为150 mm,液位高度为200 mm。对水槽的品质参数进行了测试,在核心区域内,流向速度分布均匀,不均匀度小于3%,湍流度小于2%。
1.3 试验工况
试验通过控制变量的方法考察上游扰动,波浪,探测器放置角度、位置、距离, 来流速度、探测器形状等因素对试验结果的影响。以下是各种工况的影响因素:
(1) 上游扰动:在探测器上游放置圆柱障碍物制造卡门涡街,圆柱放置与否分为2种工况;
(2) 波浪:对海洋的波浪环境进行模拟,从水面处施加波浪,分为造波和静水2种工况;
(3) 角度:海豹胡须型探测器的横截面椭圆长轴与来流方向的角度,分为平行和垂直2种工况;
(4) 距离:海豹胡须型探测器与上游圆柱间的距离,分为5d,10d和15d,其中d为上游扰流圆柱的直径;
(5) 流速:来流速度分别为0.083和0.048 m/s的高、低流速对比;
(6) 位置:俯视视角下,海豹胡须型探测器与圆柱中心轴线的偏置,分别安排了左侧、中间、右侧3个位置;
(7) 探测器形状:不同大小斜椭圆交错的海豹胡须型、椭圆柱型、圆柱型。
2 结果分析
试验过程中,采集了各工况下传感器在空间3个方向上的力信号,通过对时域信号作快速傅里叶变换(FFT),得到X, Y, Z共3个方向上受力的频谱信号。以此为依据,以下对各种工况的试验结果进行分析讨论。
2.1 上游扰动
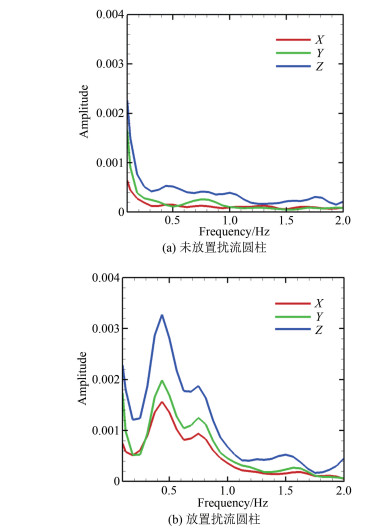
图 4展示了上游是否有扰动,即是否放置扰流圆柱时的受力频谱图对比,试验在高流速下进行,圆柱与探测器距离为5d。通过观察可以发现,在未放置扰流圆柱时,频谱图中没有主频;而放置在上游的圆柱产生扰流时,频谱图中可以观察到明显的主频。Strouhal数是表征涡街脱落频率的无量纲参数,其定义为:

2.2 波浪干扰
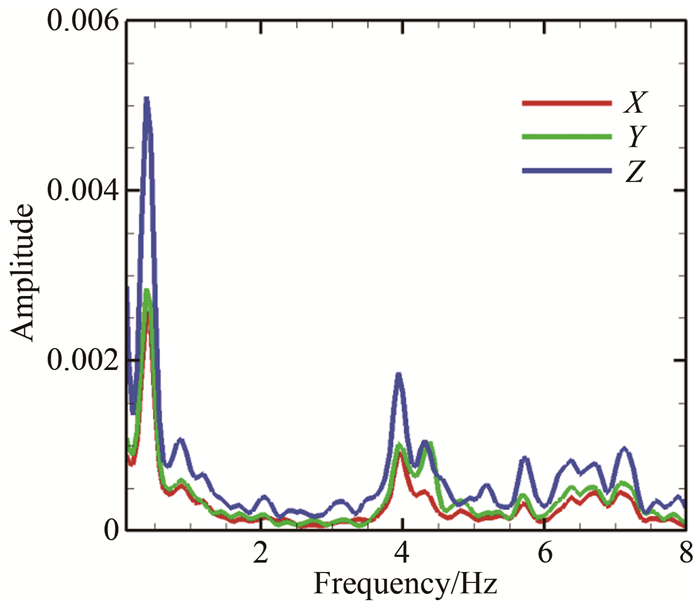
在水下探测器的实际应用场景中,噪声的影响不可避免。本试验通过制造波浪,模拟实际工况的环境噪声,观察试验结果是否受到干扰。如图 5所示,在高流速、圆柱与探测器距离为5d的工况下,海豹胡须型探测器仍然能够识别出涡街频率0.375 Hz,同时也识别出了波浪频率,但其幅值小于涡街频率,不影响探测器的识别功能。
2.3 探测器放置角度
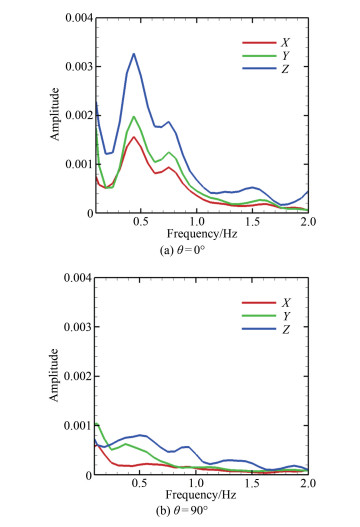
如前文所述,海豹胡须的截面形状是大小交替变化的斜椭圆,为了研究其摆放角度的影响,定义长轴与来流方向的夹角为θ。实验中研究了θ = 0°和θ = 90°这2种工况,频谱结果如图 6所示。对比发现,在θ = 0°,即长轴与来流平行时,探测器能够明显检测到卡门涡街的频率0.438 Hz;在θ = 90°,即长轴与来流方向垂直时,虽然能够检测到涡街频率,但是其幅值较低,更易受到噪声影响。由此可以得出结论,在海豹胡须型探测器以长轴平行来流方向放置时探测效果更好。因此,之后的试验中,探测器均以此方式放置。
2.4 扰流圆柱距离
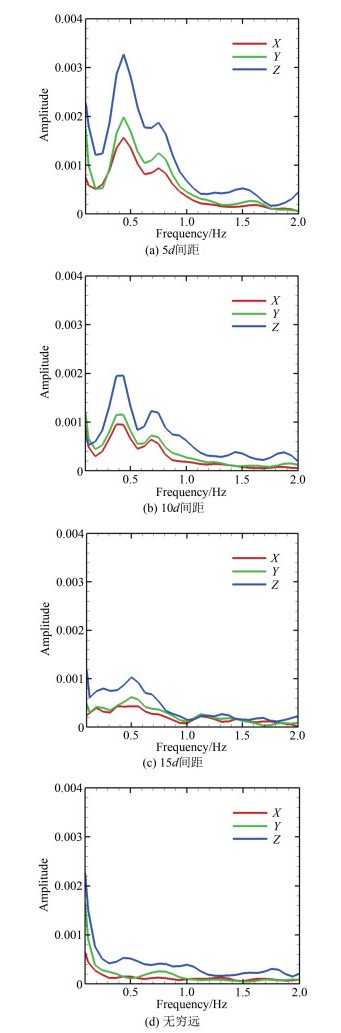
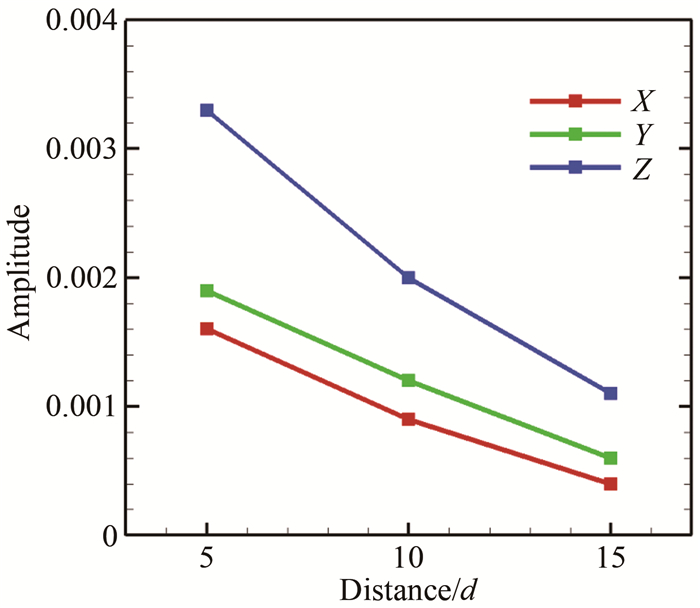
在实际应用中,探测器的性能与探测距离相关,基于此,试验工况设置了上游圆柱与探测器的4种不同距离:5d,10d,15d和无穷远(不放置扰流圆柱)。频谱图结果对比如图 7所示。可以看到,在5d,10d和15d这3个距离下,均能够检测到卡门涡街的主频。图 8对比了探测到主频的幅值与距离的关系,可以看到随着距离的增加,主频的幅值在减弱。
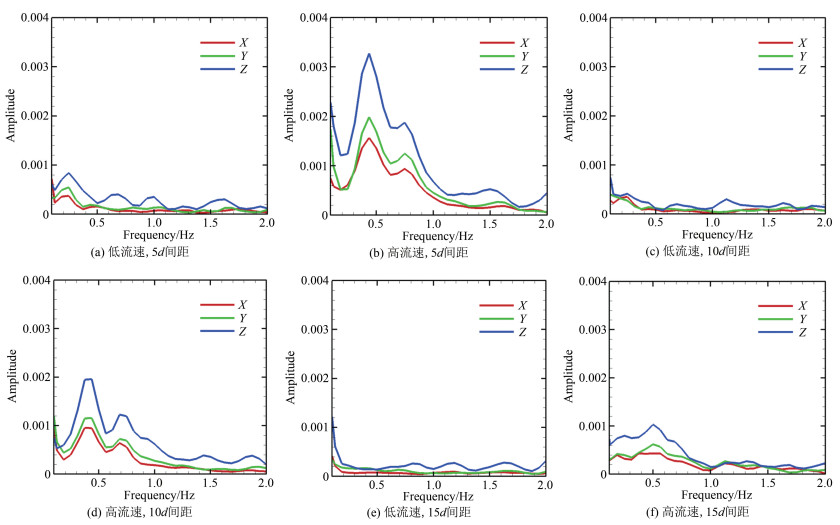
2.5 水槽流速
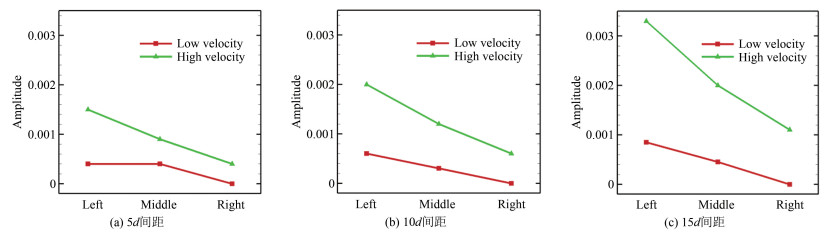
在环境水流设定为高、低2种流速的工况下探究了海豹胡须型探测器的效果,如图 9所示。图 10对比了不同流速和距离下海豹胡须型探测器受力的主频强度。在控制其他变量时,海豹胡须型探测器在高流速下的谱峰更明显,识别能力更强。这是因为高流速情况下,卡门涡街的强度更高,经过相同的距离后衰减较少。
![]() 图 10 不同流速和距离工况下的主频谱幅值Fig. 10 Spectrum peak amplitude with different flow rates and distances
图 10 不同流速和距离工况下的主频谱幅值Fig. 10 Spectrum peak amplitude with different flow rates and distances2.6 探测器位置
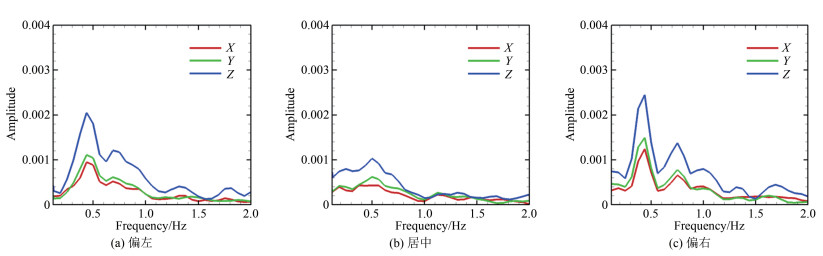
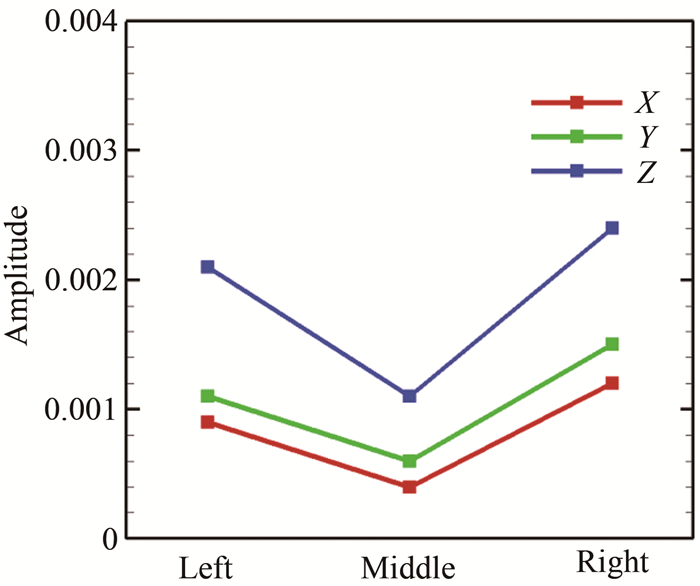
以探测器在垂直来流方向上与上游扰流圆柱中心的相对位置为控制因素,分别将探测器置于正对圆柱的中间位置和位于涡街行进路径上的左、右偏置处来研究识别频谱的幅值特性,结果如图 11所示。不同位置下海豹胡须型探测器受力主频强度的对比见图 12。从3种工况的对比中可以看出,探测器正对上游物体、即位于两列涡街之间时,频谱的幅值较小且峰值位置不明显,易受到噪声干扰。探测器位于涡街行进路线的偏置位置时,对主频信号的识别能力更强。
2.7 探测器形状
为证明海豹胡须型探测器的识别能力来自于其外形结构,制作了椭圆柱型和正圆柱型的探测器进行对比试验。3种探测器的频谱图如图 13所示。在同一工况下,对比3种探测器的频谱信号可以发现,海豹胡须型探测能力最强,椭圆柱和圆柱的频谱幅值依次减弱,并且圆柱只能在2个受力方向上测得较弱的频谱信号。
海豹胡须型探测器的原理在于其特殊结构对卡门涡街的影响。圆柱体绕流时,会受到涡街施加周期性的作用力而产生振动。王少飞[15]通过PIV实验研究发现,海豹胡须复杂的表面结构引起了流场中的三维流动,抑制了卡门涡街的脱落,从而削弱了涡街对模型的作用力。因此,相对于圆柱模型,海豹胡须模型探测信号时,受到水流的作用力小,模型自身的涡街脱落引起的噪声干扰小,在探测时具有更高的信噪比,能更好地进行环境感知。
3 结论
本文通过试验验证了海豹胡须型水下探测器在海洋环境中探测物体的可行性。在试验中,通过改变探测器放置的角度、与上游扰流圆柱的距离、环境流速、探测器相对扰流圆柱的横向位置等多种工况,对探测器采集的信号频谱进行了研究,分析了海豹胡须型探测器探测能力的影响因素。主要结论如下:
(1) 探测器频谱峰值位置的频率对应于上游物体在水流中产生的卡门涡街频率的理论值,表明海豹胡须型探测器能用于探测水下物体。
(2) 在人工造波工况下的试验过程中,海豹胡须型探测器仍能以较高的信噪比探测出卡门涡街的频率,表明其抗干扰能力能够适用于实际工况。
(3) 海豹胡须型探测器截面的椭圆长轴与水流方向平行放置时,探测效果优于垂直放置;探测器距离上游物体越近,探测能力越强;高流速工况下的探测能力强于低流速工况;在横向位置上,探测器偏置摆放的探测效果优于对中放置。
(4) 相对于椭圆和圆柱型探测器,海豹胡须型探测器具有大小斜椭圆交错的特殊结构,对水下物体的探测能力最强,在探测时具有更高的信噪比,能更好地进行环境感知。
-
![]()
图 10 不同流速和距离工况下的主频谱幅值
Fig. 10 Spectrum peak amplitude with different flow rates and distances
表 1 探测器外形尺寸参数
Table 1 Parameters of detector geometries
θ/(°) γ/(°) L/mm a1/mm b1/mm a2/mm b2/mm 15.27 17.6 31.95 20.7 8.4 16.5 10.2  下载: 导出CSV
下载: 导出CSV
-
[1] 翟聪, 薛晨阳, 穆继亮, 等.低功耗水下探测器设计[J].电子器件, 2018, 41(4):1027-1031. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzqj201804039 ZHAI C, XUE C Y, MU J L, et al. A design of low-power underwaterdetector[J]. Journal of Electron Devices, 2018, 41(4):1027-1031. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzqj201804039
[2] SAHU B K, SUBUDHI B. Adaptive tracking control of an autonomous underwatervehicle[J]. International Journal of Automation and Computing, 2014, 11(3):299-307. DOI: 10.1007/s11633-014-0792-7
[3] 张洪欣, 马龙, 张丽婷, 等.水下机器人在海洋观测领域的应用进展[J].遥测遥控, 2015, 36(5):23-27. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ycyk201505004 ZHANG H X, MA L, ZHANG L T, et al. Application development of underwater robot in the field of marineob servation[J]. Journal of Telemetry, Tracking, and Command, 2015, 36(5):23-27. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ycyk201505004
[4] 谢源.矢量推进式新型水下航行器主体的关键结构研究[D].杭州: 浙江大学, 2016. XIE Y. The research of the kev body structures of a new hybrid vectored thruster AUV[D]. Hangzhou: Zhejiang University, 2016.
[5] DEAN B, BHUSHAN B.湍流流动中鲨鱼皮表面流体减阻研究进展[J].力学进展, 2012, 42(6):821-836. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=lxjz201206012 DEAN B, BHUSHAN B. Shark-skin surfaces for fluid-drag reduction in turbulent flow:a review[J]. Advances in Mechanics, 2012, 42(6):821-836. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=lxjz201206012
[6] 吴明康.仿鲨鱼皮泳衣技术的发展与应用前景[J].纺织科技进展, 2009(2):90-91, 98. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=scfzkj200902035 WU M K. Application and development of the imitation shark skinswimsuits[J]. Progress in Textile Science & Technology, 2009(2):90-91, 98. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=scfzkj200902035
[7] 殷敬伟, 刘强, 陈阳, 等.基于海豚whistle信号的仿生主动声纳隐蔽探测技术研究[J].兵工学报, 2016, 37(5):769-777. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bgxb201605001 YIN J W, LIU Q, CHEN Y, et al. Research on bionic active sonar covert detection technology based on dolphin whistlesignal[J]. Acta Armamentarii, 2016, 37(5):769-777. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bgxb201605001
[8] DEHNHARDT G, MAUCK B, HANKE W, et al. Hydrodynamic trail-following in harbor seals (Phoca vitulina)[J]. Science, 2001, 293(5527):102-104. DOI: 10.1126/science.1060514
[9] GLÄSER N, WIESKOTTEN S, OTTER C, et al. Hydrodynamic trail following in a California sea lion (Zalophus californianus)[J]. Journal of Comparative Physiology A, 2011, 197(2):141-151.
[10] DEHNHARDT G, MAUCK B, BLECKMANN H. Seal whiskers detect watermovements[J]. Nature, 1998, 394(6690):235-236. DOI: 10.1038/28303
[11] SCHULTE-PELKUM N, WIESKOTTEN S, HANKE W, et al. Tracking of biogenic hydrodynamic trails inharbour seals (Phoca vitulina)[J]. The Journal of Experimental Biology, 2007, 210(5):781-787. DOI: 10.1242/jeb.02708
[12] MIERSCH L, HANKE W, WIESKOTTEN S, et al. Flow sensing bypinniped whiskers[J]. Philosophical Transactions of the Royal Society B:Biological Sciences, 2011, 366(1581):3077-3084. DOI: 10.1098/rstb.2011.0155
[13] WITTE M, HANKE W, WIESKOTTEN S, et al. On the wake flow dynamics behind harbor seal vibrissae-A fluid mechanical explanation for an extraordinary capability[M]//TROPEA C, BLECKMANN H. Nature-Inspired Fluid Mechanics. Berlin, Heidelberg: Springer, 2012.
[14] WIESKOTTEN S, DEHNHARDT G, MAUCK B, et al. Hydrodynamic determination of the moving direction of an artificial fin by aharbour seal (Phoca vitulina)[J]. The Journal of Experimental Biology, 2010, 213(13):2194-2200. DOI: 10.1242/jeb.041699
[15] 王少飞.海豹胡须柱状结构的仿生涡激振动流动控制机制实验研究[D].上海: 上海交通大学, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10248-1019610407.htm WANG S F. Bionic fluid control of vortex-induced vibration inspired by the seal vibration inspired by the seal vibration inspired by the seal-vibrissa-shaped cylinder[D]. Shanghai: Shanghai Jiao Tong University, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10248-1019610407.htm
-
期刊类型引用(1)
1. 孟硕,董俊皓,李彦林. 民用水下探测器设计. 科学技术创新. 2022(24): 193-196 .  百度学术
百度学术
其他类型引用(1)

计量
- 文章访问数: 260
- HTML全文浏览量: 125
- PDF下载量: 22
- 被引次数: 2






