

The influence of rotor rotation of hexacopter on wind measurement accuracy
-
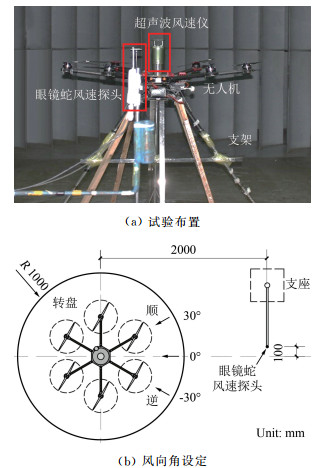
摘要: 旋翼无人机可以代替桅杆实现风场的定点或多点同时测量,但是旋翼转动引起的扰流会对测风的准确性产生影响。利用不同高度的支架,在六旋翼无人机上搭载超声波风速仪进行风洞试验,探究旋翼转动对无人机中心上方各高度处风场的影响以及不同风向角和机身倾斜对测量准确性的影响。结果表明:除个别工况外,旋翼转动均会引起较大的风速相对误差;旋翼转动引起的风速误差随高度呈先增大后减小的趋势;机身水平时,随高度增加,各工况下的风速绝对误差趋于一致,且控制风速大于6 m/s时,风速相对误差随风速增大而减小;旋翼转动对风向角测量基本没有影响。研究结果可为多旋翼无人机搭载测风仪器直接测风的实际应用提供参考。Abstract: MUAV (Micro Unmanned Aerial Vehicle) can replace the mast to measure the wind field at a fixed point or multiple points at the same time, but the disturbance caused by the rotor rotation can affect the wind measurement accuracy. An ultrasonic anemometer is attached on a hexacopter using different height brackets, and wind tunnel tests are carried out to investigate the influence of the rotor rotation on the wind field at different heights above the center of the hexacopter and the influence of different wind directions and the tilted fuselage on the measurement accuracy. The results show that rotor rotation causes a great relative wind speed error except for a few situations; The wind speed error caused by the rotor rotation increases first and then decreases with height; when the fuselage is horizontal, the absolute wind speed error tends to be the same under various conditions as the height increases, and when the control wind speed is greater than 6 m/s, the relative wind speed error decreases as the wind speed increases. Rotor rotation has almost no influence on the measurement of the wind direction angle. The results can provide reference for the practical application of wind measurement using MUAVs equipped with wind measurement devices.
-
Key words:
- MUAV /
- ultrasonic anemometer /
- wind tunnel test /
- wind direction angle
-

图 4 旋翼静止时各工况下的风速相对误差曲线
Figure 4. Curves of relative wind speed error under various conditions when rotors are stationary

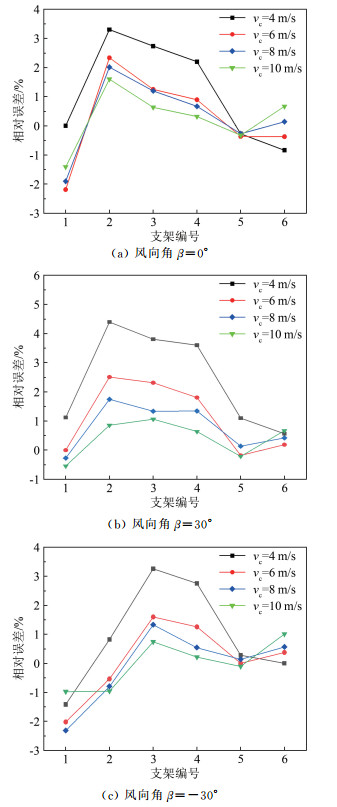
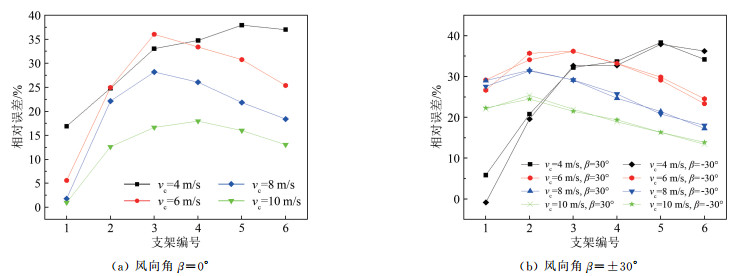
图 5 各工况下旋翼转动引起的风速相对误差曲线
Figure 5. Curves of relative wind speed error caused by rotor rotation under various conditions

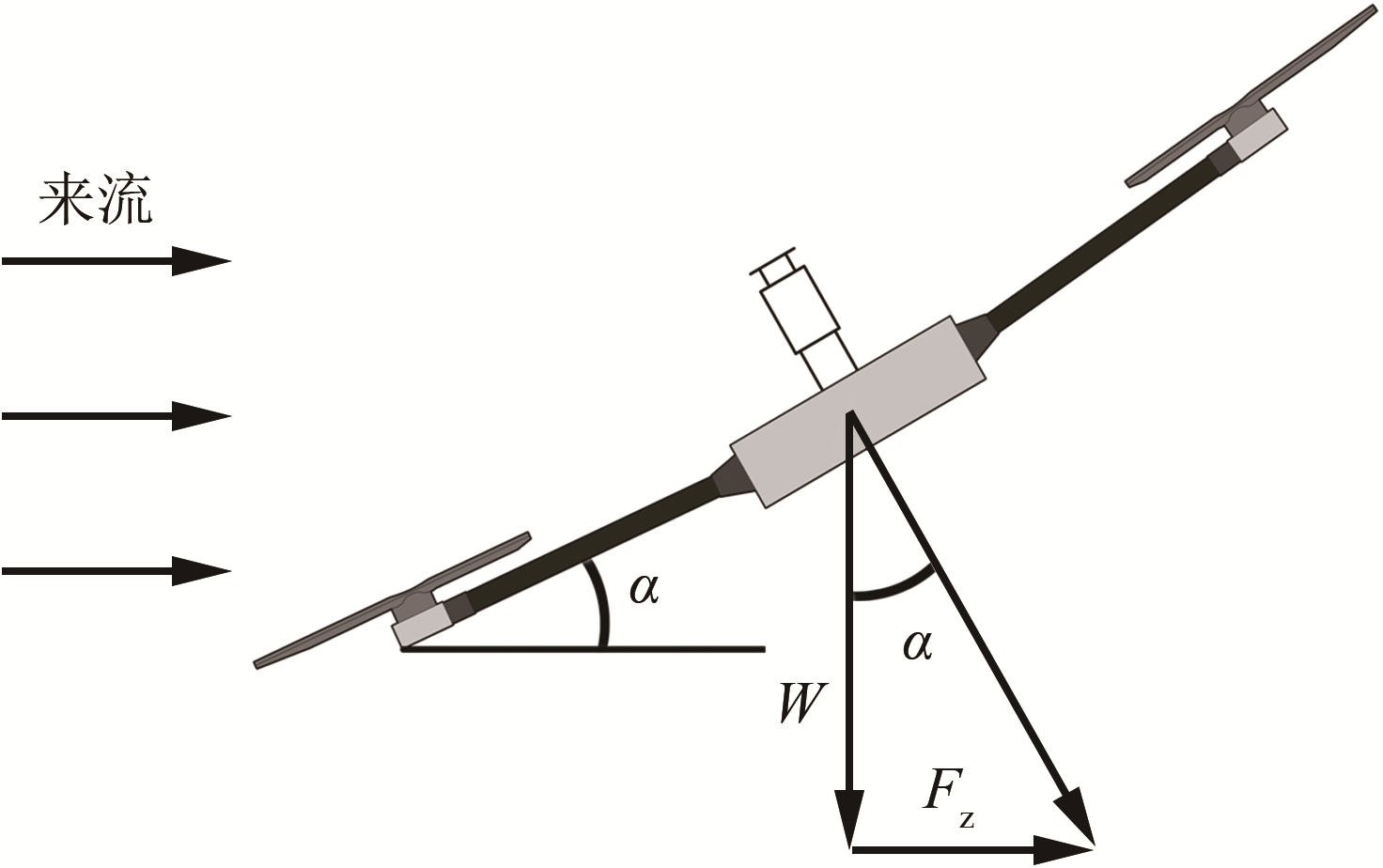
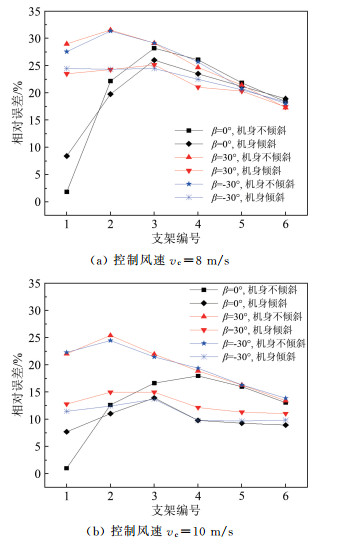
图 7 机身水平与倾斜时的风速相对误差曲线对比
Figure 7. Comparison of relative wind speed error between tilted fuselage and horizontal fuselage

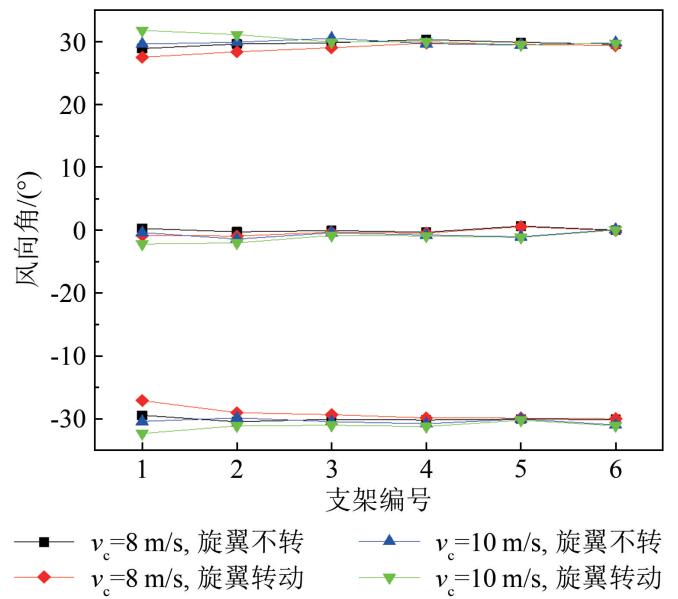
图 8 机身倾斜时各工况下测得的风向角
Figure 8. Measured angle data under various conditions when tilting the fuselage
表 1 超声波风速仪参数
Table 1. Parameters of ultrasonic anemometer
风速测量 量程 0~50 m/s 精度 0.5 m/s(v≤10 m/s), 5%(v>10 m/s) 风向测量 量程 0°~359.9° 精度 4°(v≥3 m/s)  下载: 导出CSV
下载: 导出CSV
表 2 风速标定结果
Table 2. Wind speed calibration results
控制风速vc /(m·s-1) 4 6 8 10 眼镜蛇风速探头测得风速/(m·s-1) 3.57 5.43 7.22 9.12 超声波风速仪测得风速/(m·s-1) 3.58 5.41 7.25 9.11
下载: 导出CSV
表 3 各工况下旋翼转动引起的计算湍流度变化
Table 3. The change of calculated turbulent intensity caused by rotors rotation under various conditions
支架编号风向角β旋翼状态 1号 2号 0° 30° -30° 0° 30° -30° 静 动 静 动 静 动 静 动 静 动 静 动 湍流度/(%) 4 m/s 2.30 1.96 2.30 2.54 2.30 2.76 2.01 1.77 2.23 1.89 1.84 2.14 6 m/s 1.70 1.42 1.50 1.43 1.45 1.42 1.35 1.27 1.37 1.16 1.47 1.13 8 m/s 1.17 2.14 1.21 1.05 1.27 1.03 1.01 1.07 1.15 0.82 1.15 0.81 10 m/s 1.01 2.65 0.96 0.77 0.86 0.70 0.88 1.09 0.90 0.65 0.95 0.80 支架编号风向角β旋翼状态 3号 4号 0° 30° -30° 0° 30° -30° 静 动 静 动 静 动 静 动 静 动 静 动 湍流度/(%) 4 m/s 2.09 1.76 2.14 2.25 1.91 1.77 2.30 1.81 2.13 1.79 2.28 1.95 6 m/s 1.40 1.02 1.47 1.13 1.24 1.12 1.61 1.22 1.43 1.07 1.64 1.00 8 m/s 1.13 0.85 1.16 0.94 1.00 0.93 1.17 0.89 1.00 0.84 1.08 0.91 10 m/s 0.96 0.91 1.00 0.79 0.92 0.82 0.91 0.78 0.90 0.85 0.83 0.82 支架编号风向角β旋翼状态 5号 6号 0° 30° -30° 0° 30° -30° 静 动 静 动 静 动 静 动 静 动 静 动 湍流度/(%) 4 m/s 2.54 1.71 2.41 1.76 2.21 1.68 2.40 1.58 2.18 1.63 2.43 1.50 6 m/s 1.65 1.22 1.69 1.15 1.60 1.07 1.50 1.26 1.63 1.21 1.64 1.29 8 m/s 1.20 0.97 1.29 1.00 1.01 0.89 1.13 0.95 1.27 0.91 1.23 1.03 10 m/s 1.02 0.93 1.00 0.80 0.85 0.79 0.94 0.80 0.95 0.87 1.01 0.75
下载: 导出CSV
表 4 各工况下旋翼转动引起的风速绝对误差
Table 4. Absolute wind speed error caused by rotor rotation under various conditions
风向角β控制风速vc 0° 30° -30° 4 m/s 6 m/s 8 m/s 10 m/s 4 m/s 6 m/s 8 m/s 10 m/s 4 m/s 6 m/s 8 m/s 10 m/s 绝对误差/(m·s-1) 1号 0.60 0.30 0.13 0.09 0.21 1.59 2.13 2.02 -0.03 1.42 1.97 2.03 2号 0.93 1.42 1.68 1.20 0.79 1.95 2.39 2.40 0.72 1.98 2.32 2.27 3号 1.24 2.04 2.14 1.58 1.23 2.08 2.21 2.09 1.24 2.07 2.22 2.04 4号 1.29 1.88 1.96 1.69 1.26 1.87 1.86 1.78 1.22 1.87 1.93 1.82 5号 1.37 1.68 1.60 1.47 1.41 1.60 1.57 1.50 1.36 1.63 1.53 1.50 6号 1.31 1.36 1.32 1.18 1.22 1.25 1.24 1.21 1.26 1.31 1.29 1.25
下载: 导出CSV
-
[1] 李阳, 吴旻.无人机测风技术研究[J].传感器世界, 2014, 20(11): 9-13. doi: 10.3969/j.issn.1006-883X.2014.11.002Li Y, Wu M. UAV wind speed measuring technologies[J].Sensor World, 2014, 20(11): 9-13. doi: 10.3969/j.issn.1006-883X.2014.11.002 [2] Holland G J, Webster P J, Curry J A, et al. The aerosonde robotic aircraft: A new paradigm for environmental observation[J]. Bulletin of the American Meteorology Society, 2001, 82(5): 889-902. doi: 10.1175/1520-0477(2001)082<0889:TARAAN>2.3.CO;2 [3] 马舒庆, 汪改, 潘毅, 等.微型无人驾驶飞机气象探空系统[J].南京气象学院学报, 1998, 21(4): 715-721. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK199800433524Ma S Q, Wang G, Pan Y, et al. A robot plane meteorological sound system[J]. Journal of Nanjing Institute of Meteorology, 1998, 21(4): 715-721. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK199800433524 [4] 马舒庆, 汪改, 潘毅, 等.微型探空飞机解析测风方法[J].大气科学, 1999, 23(3): 377-284. doi: 10.3878/j.issn.1006-9895.1999.03.15Ma S Q, Wang G, Pan Y, et al. An analytical method for wind measurements by a mini-aircraft[J]. Chinese Journal of Atmospheric Science, 1999, 23(3): 377-284. doi: 10.3878/j.issn.1006-9895.1999.03.15 [5] 屈耀红, 凌琼, 闫建国, 等.无人机DR/GPS/RP导航中风场估计仿真[J].系统仿真学报, 2009, 21(7):1822-1825. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtfzxb200907006Qu Y H, Ling Q, Yan J G, et al. Wind field estimation simulation technology in DR/GPS/RP integrated navigation of UAV[J]. Journal of System Simulation, 2009, 21(7): 1822-1825. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtfzxb200907006 [6] 周树道, 王彦杰, 王敏, 等.基于气象无人机飞行角度的改进型测风模型[J].飞行力学, 2011, 29(1): 26-29. http://d.old.wanfangdata.com.cn/Periodical/fxlx201101007Zhou S D, Wang Y J. Improved wind model based on the meteorological UAV flight angles[J]. Flight Dynamics, 2011, 29(1): 26-29. http://d.old.wanfangdata.com.cn/Periodical/fxlx201101007 [7] 刘伟.基于惯性/多普勒组合导航的风速风向测量研究[D].南京: 南京航空航天大学, 2011. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=D166737Liu W. Research on wind speed and direction measurement based on INS/Doppler integrated navigation[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2011. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=D166737 [8] 史忠科, 王润全.基于飞机运动方程的逐步预测"野值"剔除方法[J].系统仿真学报, 2010, 22(10): 2250-2252, 2286. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtfzxb201010003Shi Z K, Wang R Q. Canceling outlier by step-by-step prediction with flight motion equation[J]. Journal of System Simulation, 2010, 22(10): 2250-2252, 2286. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtfzxb201010003 [9] Neumann P P, Bartholmai M, Bartholmai M. Real-time wind estimation on a micro unmanned aerial vehicle using its inertial measurement unit[J]. Sensors and Actuators A: Physical, 2015, 235: 300-310. doi: 10.1016/j.sna.2015.09.036 [10] Prudden S, Fisher A, Marino M, et al. Measuring wind with Small Unmanned Aircraft Systems[J]. Journal of Wind Engi-neering and Industrial Aerodynamics, 2018, 176: 197-210. doi: 10.1016/j.jweia.2018.03.029 [11] Prudden S, Fisher A, Mohamed A, et al. A flying anemometer quadrotor: Part 1[C]//Proc of the 7th International Micro Air Vehicle Conference and Competition(IMAV 2016). 2016. [12] de Boisblanc I, Dodbele N, Kussmann L, et al. Designing a hexacopter for the collection of atmospheric flow data[C]//Proc of the 2014 Systems and Information Engineering Design Symposium (SIEDS).2014. https://www.researchgate.net/publication/269302155_Designing_a_hexacopter_for_the_collection_of_atmospheric_flow_data [13] Bruschi P, Piotto M, Dell'Agnello F, et al. Wind speed and direction detection by means of solid-state anemometers embedded on small quadcopters[J]. Procedia Engineering, 2016, 168: 802-805. doi: 10.1016/j.proeng.2016.11.274 [14] 李晓华, 郭正.无人机螺旋桨气动特性数值模拟分析[C]//2014(第五届)中国无人机大会论文集.北京: 中国航空学会, 2014: 471-476. http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZGHU201409001095.htmLi X H, Guo Z. Numerical simulation analysis of aerodynamic characteristics of UAV propeller[C]//UAS China Conference 2014. Beijng: Chinese Society of Aeronautics and Astronautics, 2014: 471-476. http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZGHU201409001095.htm [15] 刘雪松, 昂海松, 肖天航.悬停状态旋翼间干扰对四旋翼升力影响分析[J].航空工程进展, 2014, 5(2): 148-153. doi: 10.3969/j.issn.1674-8190.2014.02.003Liu X S, Ang H S, Xiao T H. Analysis of rotor interference effects on quad-rotor lift in hover[J]. Advances in Aeronautical Science and Engineering, 2014, 5(2): 148-153. doi: 10.3969/j.issn.1674-8190.2014.02.003 [16] 沈奥, 周树道, 王敏, 等.旋翼无人机大气探测设备布局仿真优化设计[J].计算机测量与控制, 2018, 26(2): 165-169, 174. http://d.old.wanfangdata.com.cn/Periodical/jsjzdclykz201802041Shen A, Zhou S D, Wang M, et al. Simulation and optimization design of atmospheric detection equipment layout based on UAV[J]. Computer Measurement and Control, 2018, 26(2): 165-169, 174. http://d.old.wanfangdata.com.cn/Periodical/jsjzdclykz201802041 -


 点击查看大图
点击查看大图

计量
- 文章访问数: 260
- HTML全文浏览量: 116
- PDF下载量: 26
- 被引次数: 0






