

Research on mode switch logic in Unmanned Aerial Vehicle autonomous soaring
-
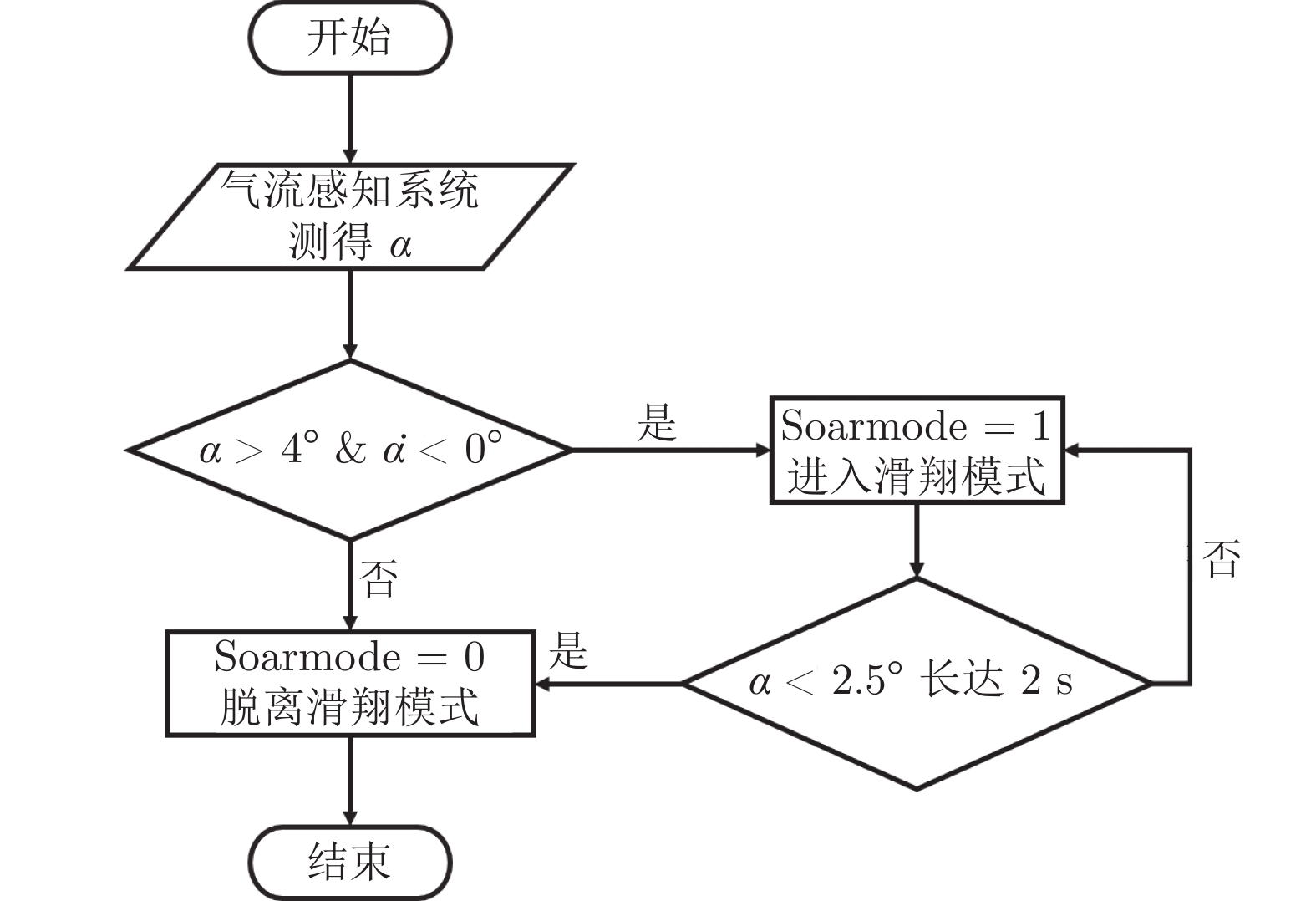
摘要: 无人机可以通过自主滑翔从自然环境里的热上升气流中获取能量,提高自身的续航能力。在此期间,模式切换是无人机自主滑翔的关键。针对该问题,设计了基于七孔探针和嵌入式技术的气流感知系统,该系统可测量流动角高达72°的气流方向和速度。基于气流感知系统,设计了控制无人机自主进入和脱离滑翔模式的模式切换逻辑。通过在风洞中模拟热上升气流,利用风洞虚拟飞行试验验证了所设计模式切换逻辑的可行性。试验结果表明:在不同速度的热上升气流作用下,基于气流感知系统设计的模式切换逻辑都能够使无人机自主进入和脱离滑翔模式,且在不同大小的滚转角指令下,模式切换逻辑都能够使无人机脱离滑翔模式。Abstract: Unmanned Aerial Vehicle(UAV) can obtain energy from the thermal updraft in the natural environment by autonomous soaring to improve its endurance. Mode switch is the key of UAV autonomous soaring. For the mode switch problem in autonomous soaring of UAV, an airflow sensing system was designed based on the seven-hole probe and the embedded technology. The airflow sensing system could measure the direction and speed of airflow up to 72° flow angle. Based on the airflow sensing system, the mode switch logic was designed to control the UAV to enter and leave the soaring mode. Using the wind tunnel virtual flight experiment technology, the situation of UAV encountering thermal updraft was simulated in the wind tunnel to verify the feasibility of the designed mode switch logic. Results of the wind tunnel virtual flight experiment show that under the influence of different sizes of updraft, the mode switch logic designed based on the airflow sensing system could make the UAV enter and leave the soaring mode independently, and the mode switch logic could make the UAV leave the soaring mode under different roll angle commands.
-
Key words:
- UAV /
- thermal updraft /
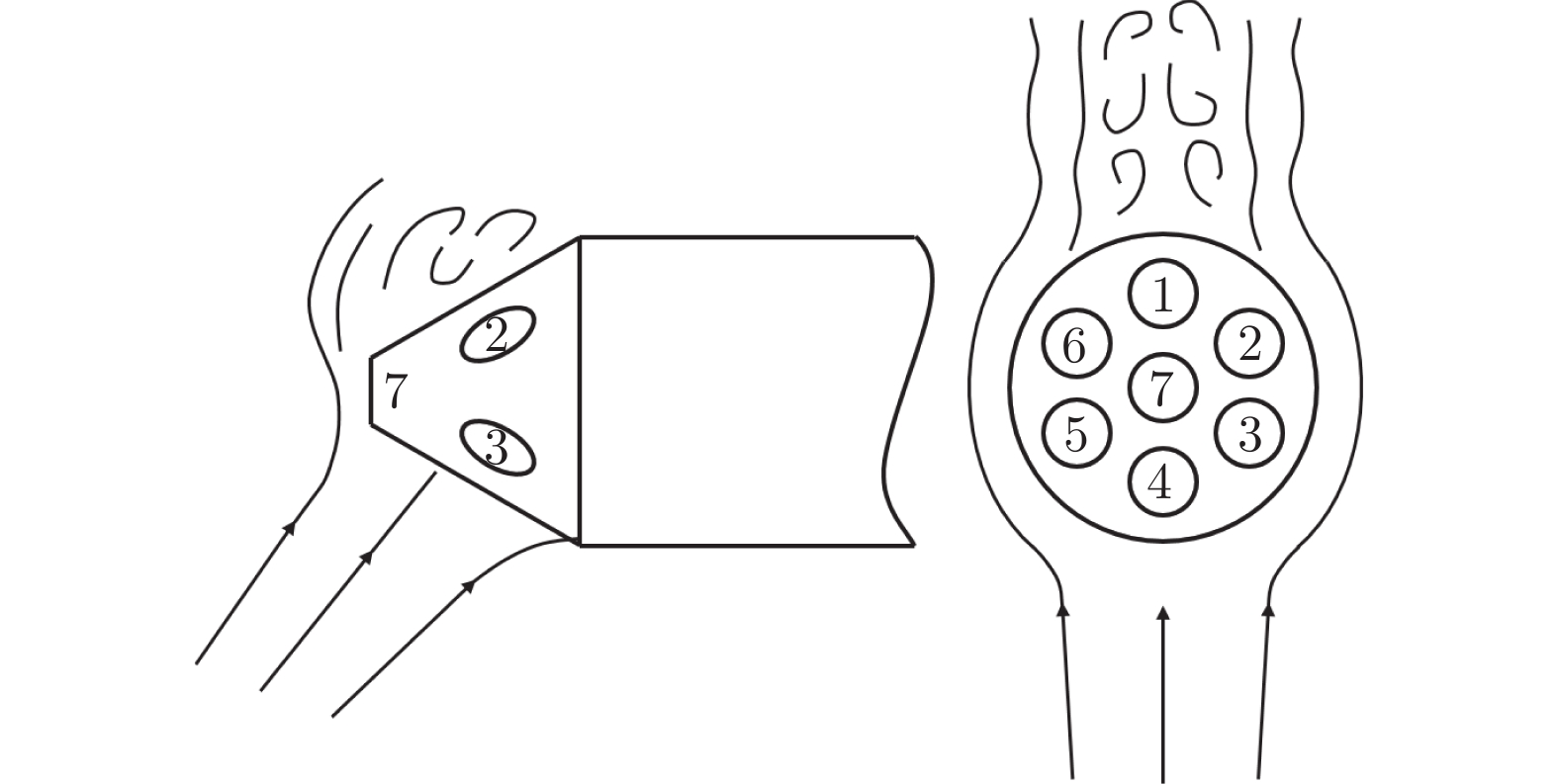
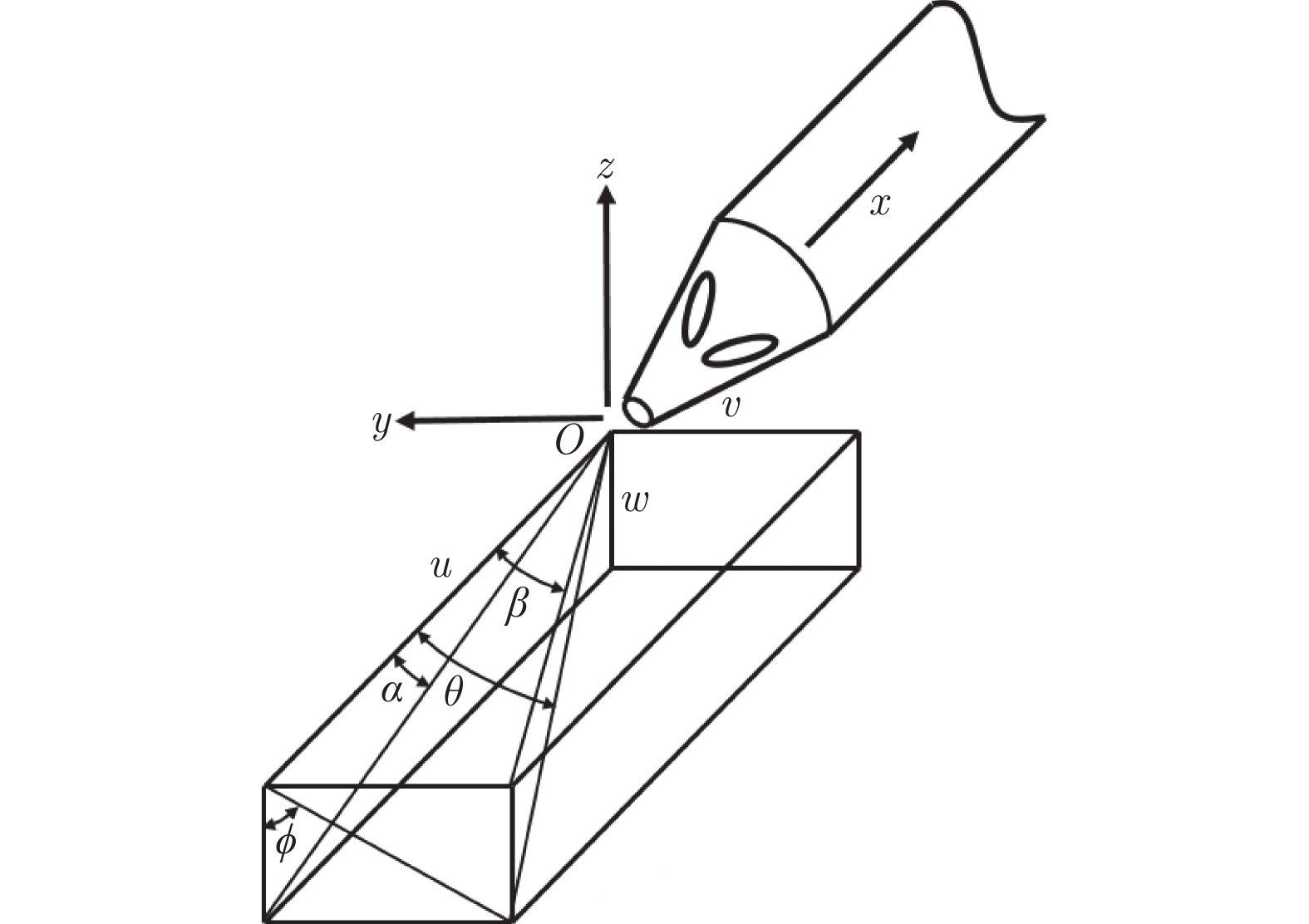
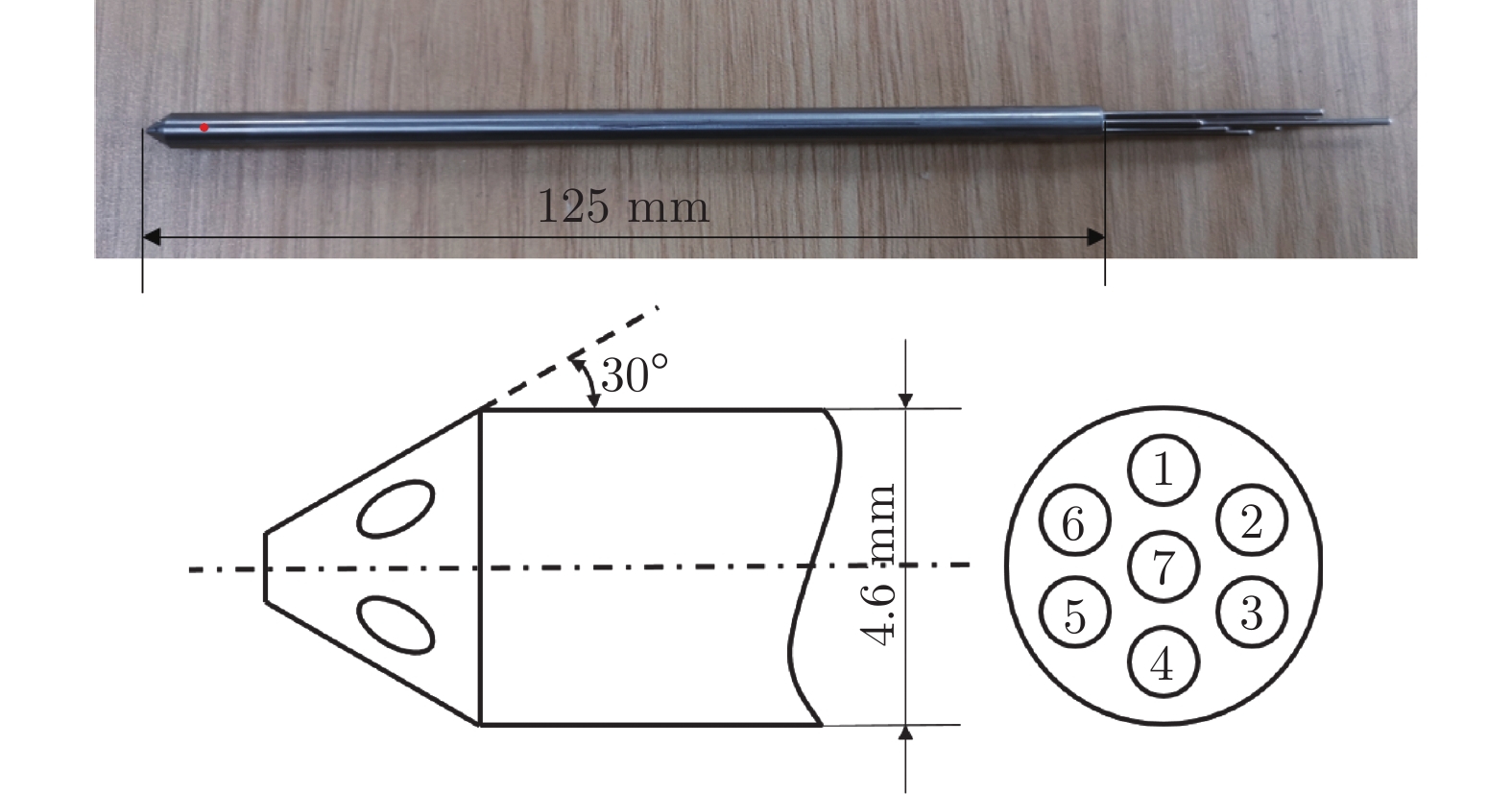
- seven-hole probe /
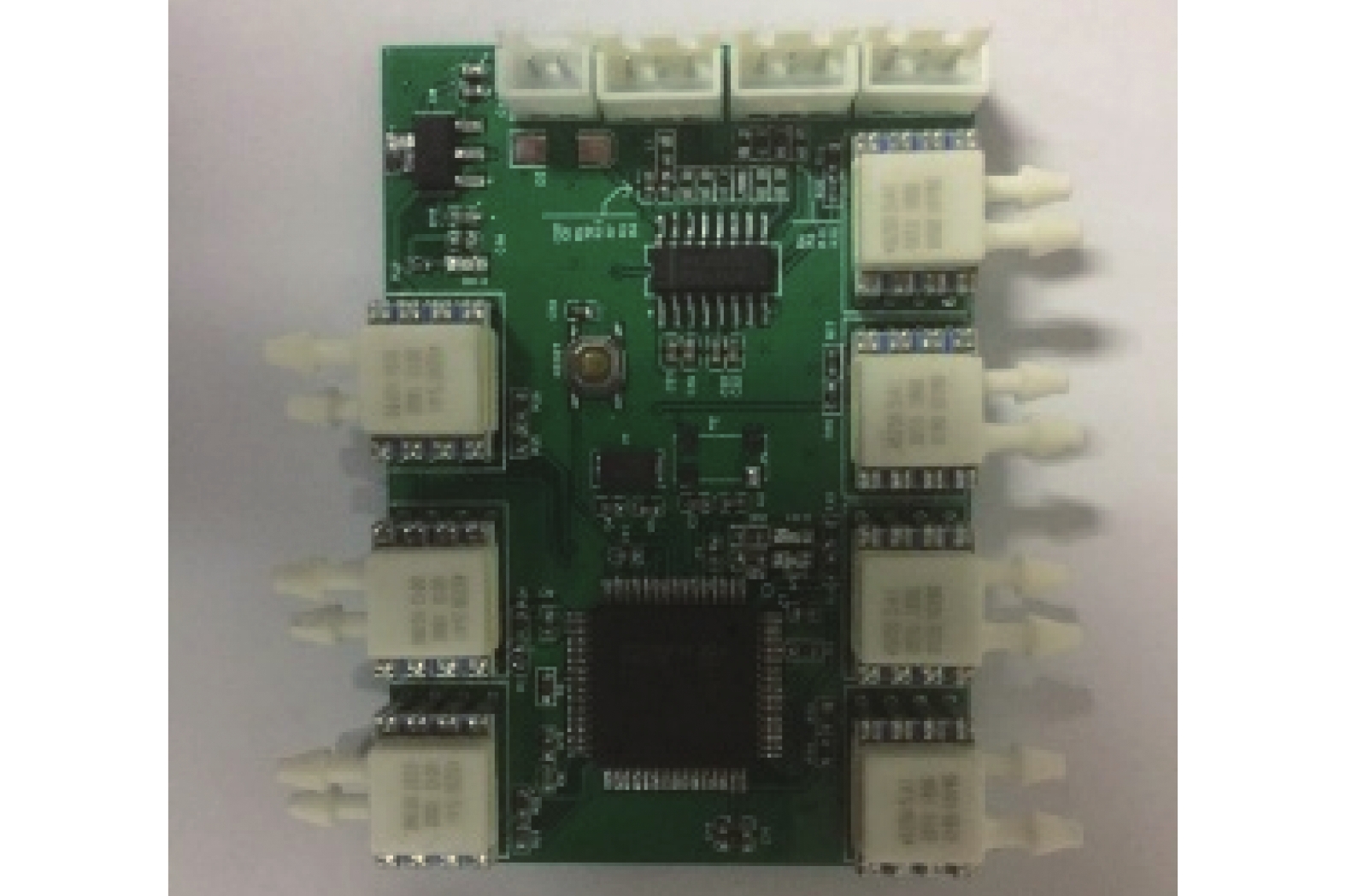
- airflow sensing system /
- mode switch logic /
- wind tunnel virtual flight
-
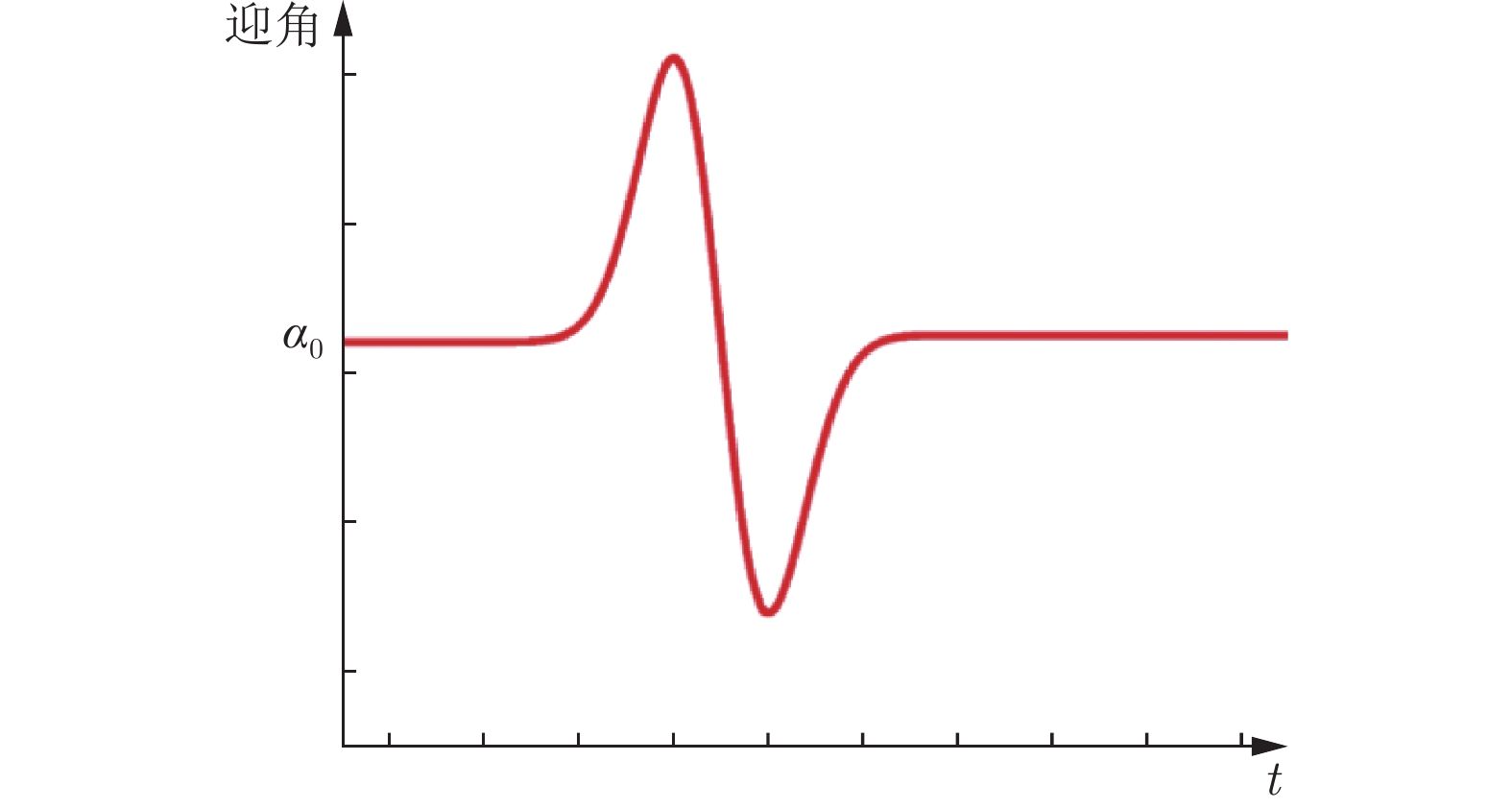
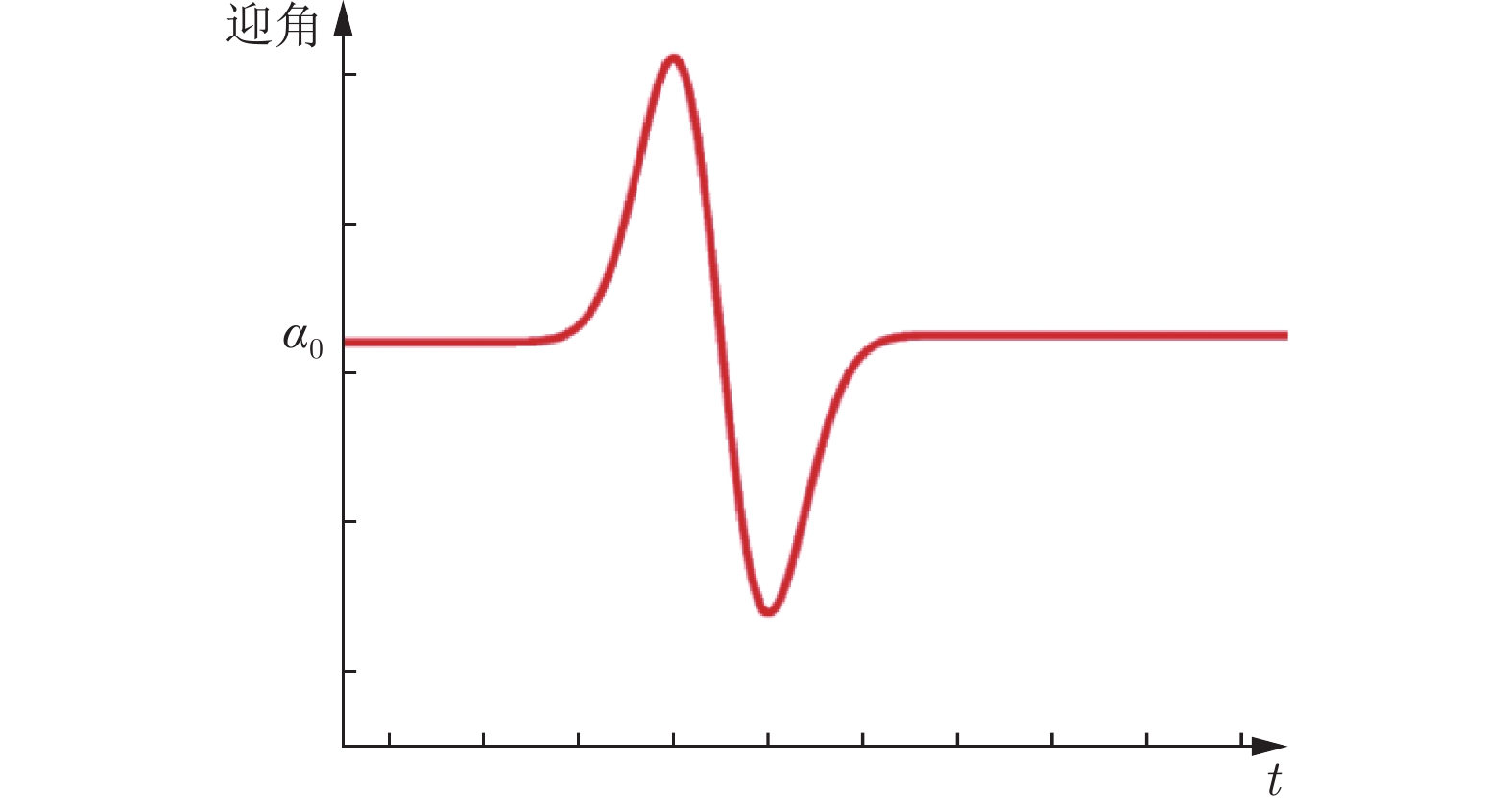
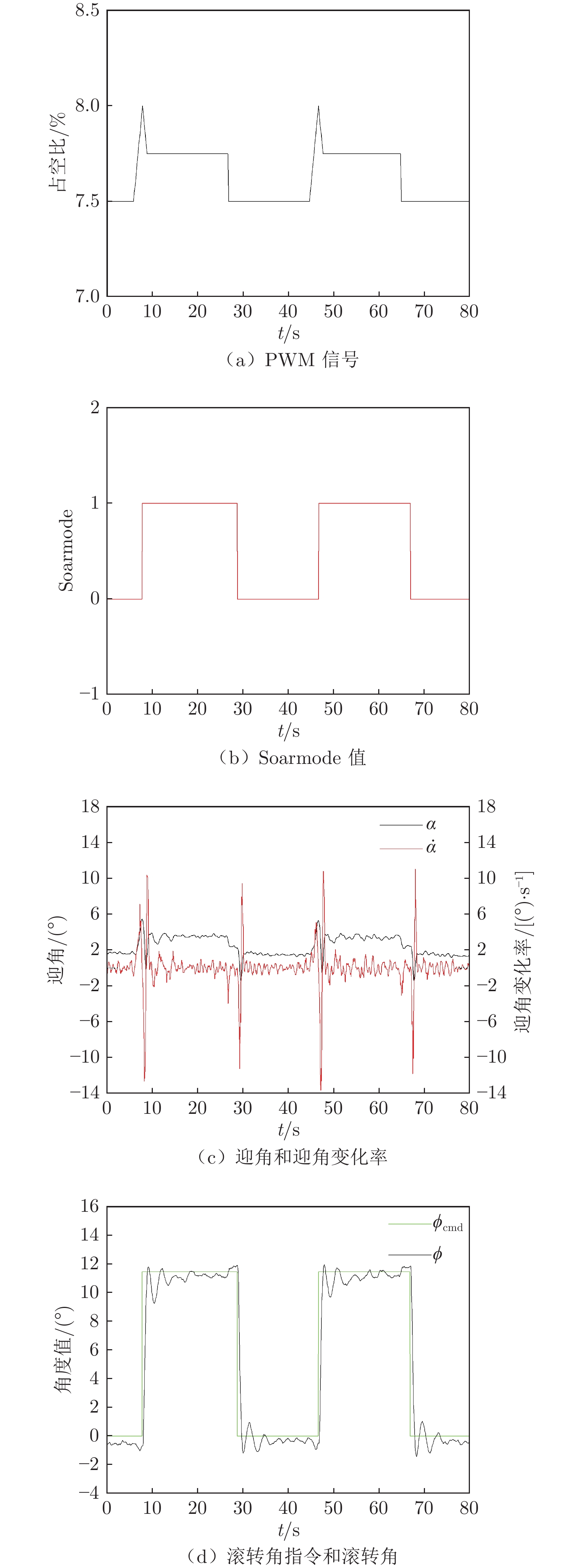
图 9 飞行器飞经热上升气流区域时迎角的变化情况
Figure 9. Change in angle of attack when an aircraft flying through a thermal updraft

图 13 小流动角下(7区)迎角系数曲线
Figure 13. Pressure coefficient curve of angle of attack at small angle (zone 7)

图 14 小流动角下(7区)侧滑角系数曲线
Figure 14. Pressure coefficient curve of side slip angle at small angle (zone 7)

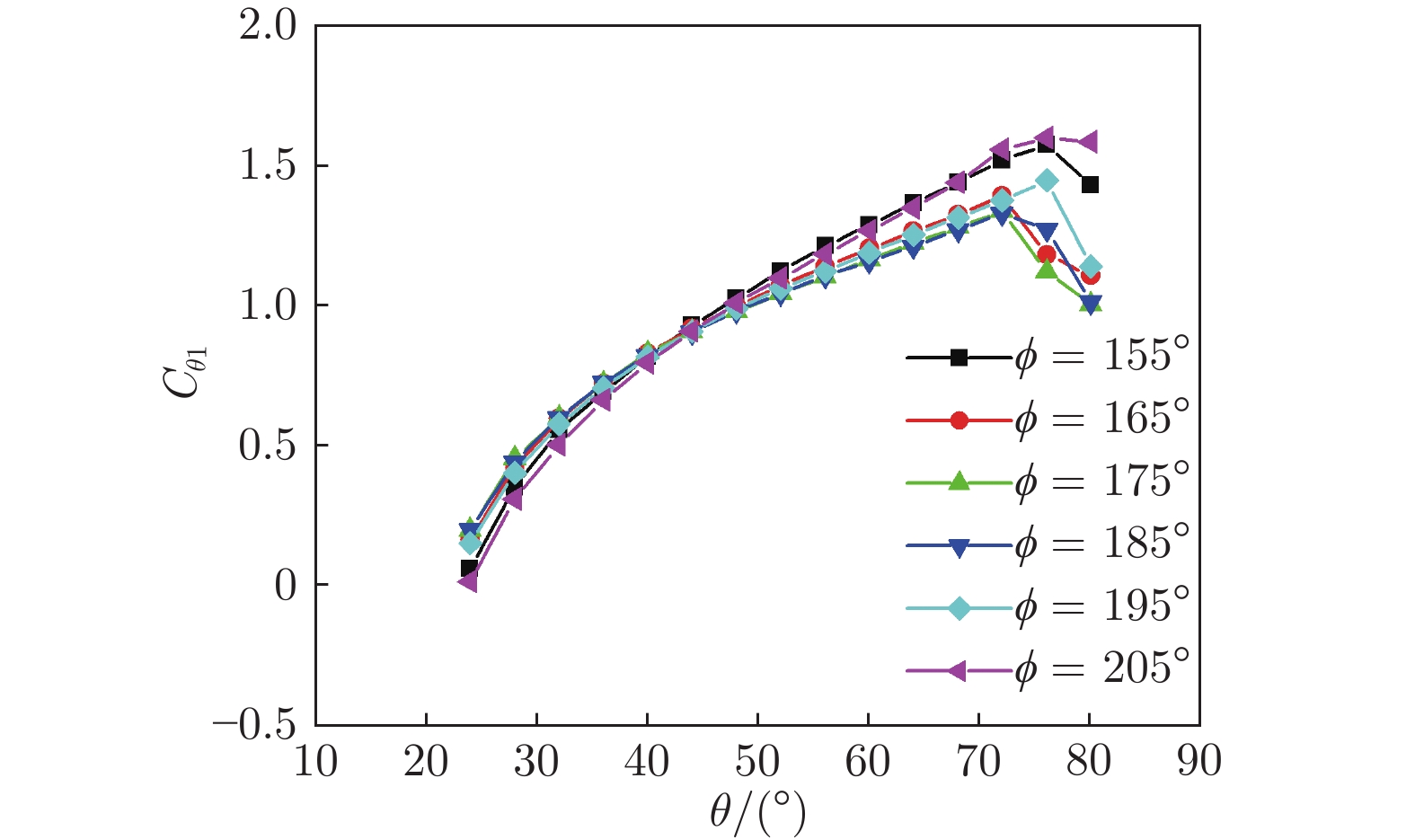
图 15 大流动角下(1区)俯仰系数曲线
Figure 15. Pitch pressure coefficient curve at high angle (zone 1)
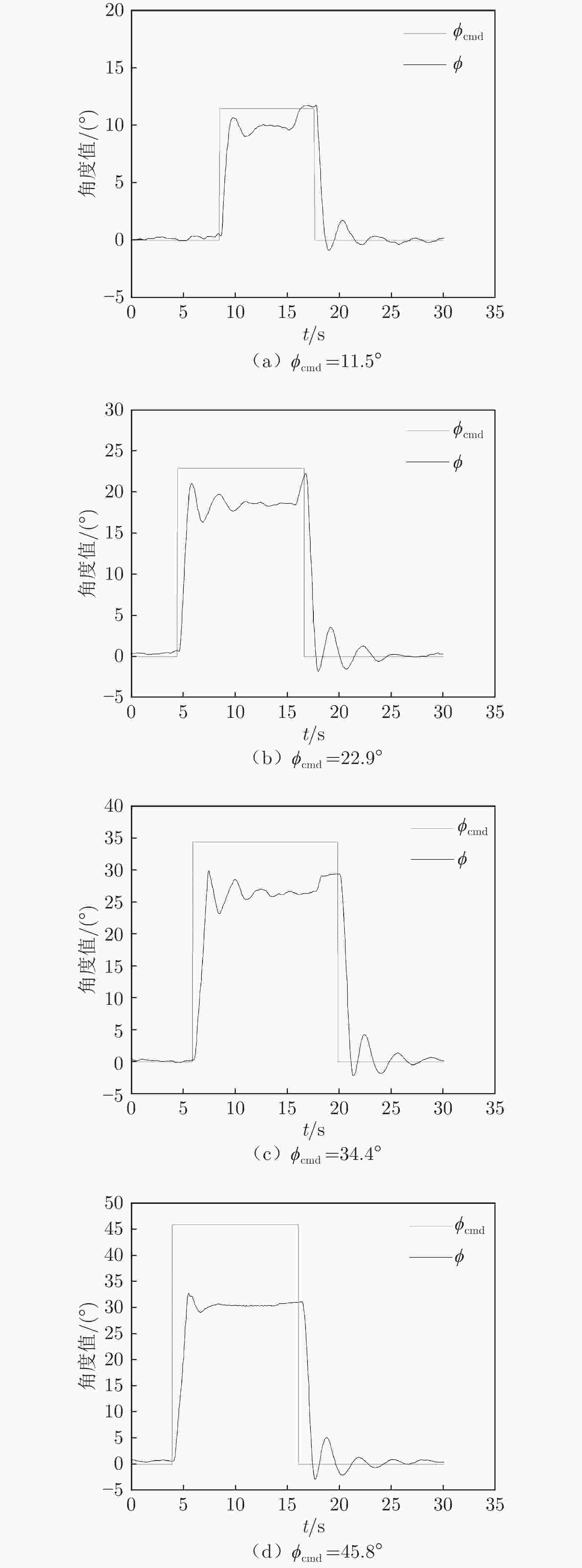
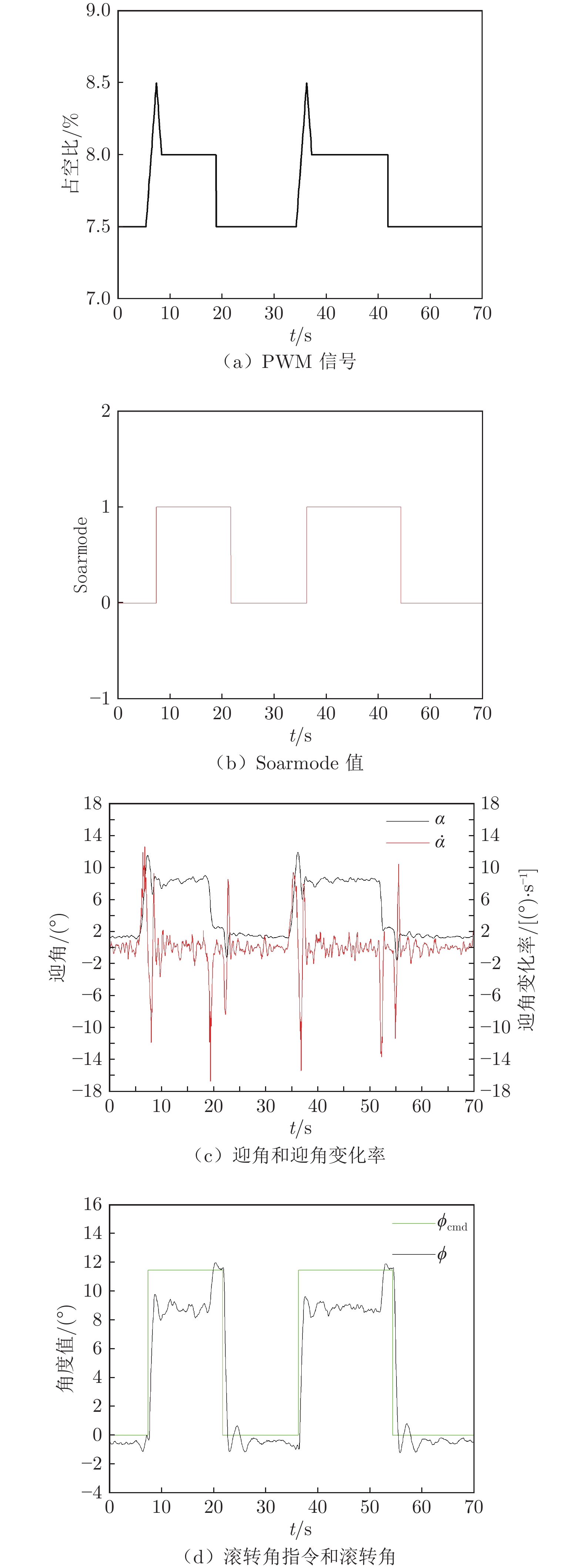
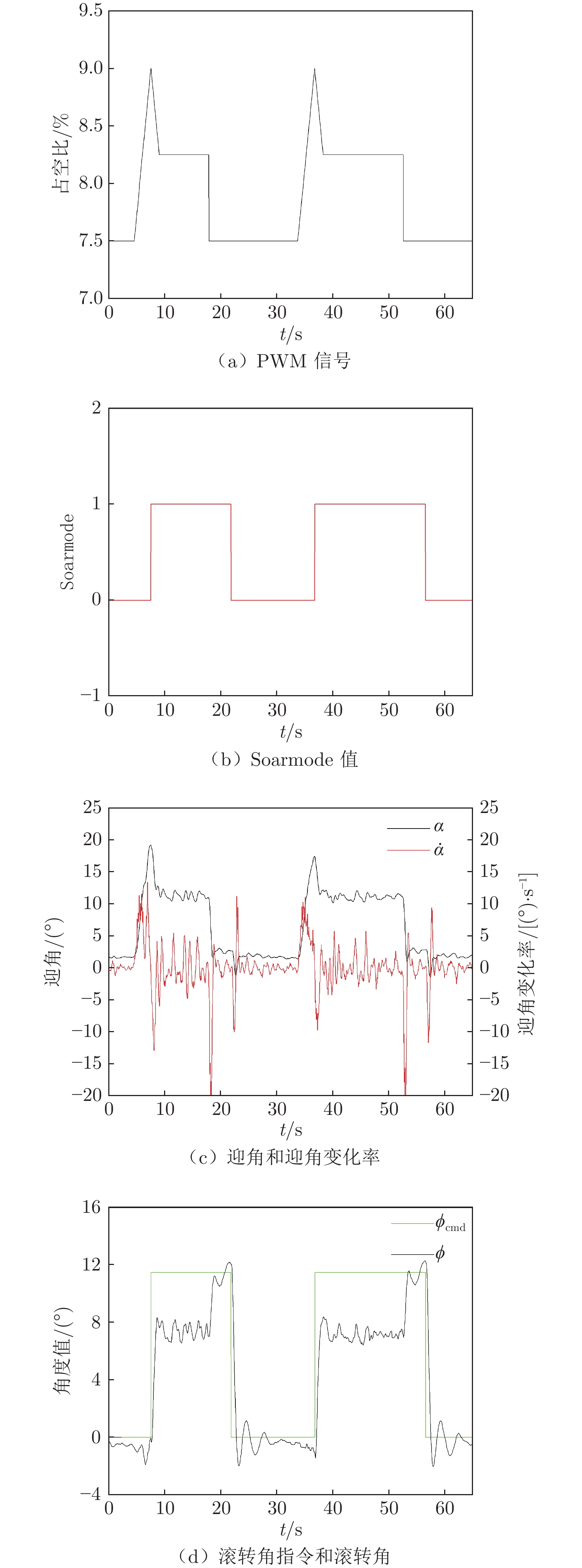
图 20 滚转角指令和滚转角随时间的变化情况
Figure 20. Change of roll angle command and roll angle with time
表 1 试验模型几何参数
Table 1. Geometric parameters of the test model
几何参数 值 参考面积S/m2 0.095 参考展长L/m 1 平均气动弦长c/m 0.16 质心位置 内翼根弦长35%处  下载: 导出CSV
下载: 导出CSV
表 2 热上升气流速度标定
Table 2. Calibration of updraft velocity
占空比/% 电压/V 电流/A 上升气流速度/(m·s−1) 7.500 25 0 0 7.750 25 4.4 2.7 8.000 25 9.2 4.9 8.250 25 17.2 6.6 8.500 25 26.2 8.0 8.875 25 34.2 9.0 9.000 25 44.1 9.8
下载: 导出CSV
表 3 七孔探针校准曲线拟合的标准偏差
Table 3. Standard deviation of calibration curve fitting of seven hole probe
内区 外区 标准偏差 值 标准偏差 值 σ(α) 0.15° σ(θ) 0.46° σ(β) 0.11° σ(ϕ) 0.50° $\dfrac{\sigma (p_0)}{(p_0-p_\infty )} $ 0.46% $\dfrac{\sigma (p_0)}{(p_0-p_\infty )} $ 0.77% $\dfrac{\sigma (p_0-p_\infty)}{(p_0-p_\infty )} $ 1.29% $\dfrac{\sigma (p_0-p_\infty)}{(p_0-p_\infty )} $ 2.25%
下载: 导出CSV
-
[1] AUSTIN R. Unmanned aircraft systems: UAVs design, development and deployment[M]. Chichester: John Wiley & Sons, Ltd., 2010. doi: 10.1002/9780470664797 [2] KOCHAN A. Automation in the sky[J]. Industrial Robot:an International Journal, 2005, 32(6): 468–471. doi: 10.1108/01439910510629181 [3] WEATHERINGTON D, DEPUTY U. Unmanned aircraft systems roadmap 2005-2030[R]. OUSD(AT&L), 2005. [4] VAN BLYENBURGH P. UAVs: an overview[J]. Air & Space Europe, 1999, 1(5-6): 43–47. doi: 10.1016/S1290-0958(00)88869-3 [5] 刘国春. 大展弦比机翼气动外形设计方案研究[J]. 飞机设计, 2011, 31(3): 9–12, 36. doi: 10.3969/j.issn.1673-4599.2011.03.003LIU G C. Research on design of high aspect wing shape[J]. Aircraft Design, 2011, 31(3): 9–12, 36. doi: 10.3969/j.issn.1673-4599.2011.03.003 [6] 陈学孔, 郭正, 易凡, 等. 低雷诺数翼型的气动外形优化设计[J]. 空气动力学学报, 2014, 32(3): 300–307. doi: 10.7638/kqdlxxb-2012.0134CHEN X K, GUO Z, YI F, et al. Aerodynamic shape optimization and design of airfoils with low Reynolds number[J]. Acta Aerodynamica Sinica, 2014, 32(3): 300–307. doi: 10.7638/kqdlxxb-2012.0134 [7] KLESH A T, KABAMBA P T. Solar-powered aircraft: energy-optimal path planning and perpetual endurance[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(4): 1320–1329. doi: 10.2514/1.40139 [8] 王红波, 祝小平, 周洲, 等. 太阳能无人机螺旋桨滑流气动特性分析[J]. 西北工业大学学报, 2015, 33(6): 913–920. doi: 10.3969/j.issn.1000-2758.2015.06.008WANG H B, ZHU X P, ZHOU Z, et al. Aerodynamic investigation on propeller slipstream flows for solar powered airplanes[J]. Journal of Northwestern Polytechnical University, 2015, 33(6): 913–920. doi: 10.3969/j.issn.1000-2758.2015.06.008 [9] RAYLEIGH. The soaring of birds[J]. Nature, 1883, 27(701): 534–535. doi: 10.1038/027534a0 [10] BENCATEL R, TASSO DE SOUSA J, GIRARD A. Atmospheric flow field models applicable for aircraft endurance extension[J]. Progress in Aerospace Sciences, 2013, 61: 1–25. doi: 10.1016/j.paerosci.2013.03.001 [11] CONE C D. Thermal soaring of birds[J]. American Scientist, 1962, 50(1): 180–209. [12] ALLEN M. Updraft model for development of autonomous soaring uninhabited air vehicles[C]//Proc of the 44th AIAA Aerospace Sciences Meeting and Exhibit. 2006: 1510. doi: 10.2514/6.2006-1510 [13] ALLEN M, LIN V. Guidance and control of an autonomous soaring vehicle with flight test results[C]//Proc of the 45th AIAA Aerospace Sciences Meeting and Exhibit. 2007. doi: 10.2514/6.2007-867 [14] WHARINGTON J. Autonomous control of soaring aircraft by reinforcement learning[D]. Melbourne: Royal Melbourne Institute of Technology, 1998. [15] KAHVECI N E, IOANNOU P A, MIRMIRANI M D. Adaptive LQ control with anti-windup augmentation to optimize UAV performance in autonomous soaring applications[J]. IEEE Transactions on Control Systems Technology, 2008, 16(4): 691–707. doi: 10.1109/TCST.2007.908207 [16] EDWARDS D. Implementation details and flight test results of an autonomous soaring controller[C]//Proc of the AIAA Guidance, Navigation and Control Conference and Exhibit. 2008. doi: 10.2514/6.2008-7244 [17] 吴吉昌, 李成勤, 朱俊强. 七孔探针及其在叶栅二次流动测量中的应用[J]. 航空动力学报, 2011, 26(8): 1879–1886. doi: 10.13224/j.cnki.jasp.2011.08.033WU J C, LI C Q, ZHU J Q. Seven-hole probe and its application in the secondary flow for a high-load compressor cascade[J]. Journal of Aerospace Power, 2011, 26(8): 1879–1886. doi: 10.13224/j.cnki.jasp.2011.08.033 [18] VENKATESWARA BABU C, GOVARDHAN M, SITARAM N. A method of calibration of a seven-hole pressure probe for measuring highly three-dimensional flows[J]. Measurement Science and Technology, 1998, 9(3): 468–476. doi: 10.1088/0957-0233/9/3/022 [19] 余莉, 滕海山, 明晓. 利用七孔探针对降落伞流场的试验测量研究[J]. 中国空间科学技术, 2007, 27(5): 65–71. doi: 10.3321/j.issn:1000-758X.2007.05.011YU L, TENG H S, MING X. Seven-hole probe measurement on parachute flow field[J]. Chinese Space Science and Technology, 2007, 27(5): 65–71. doi: 10.3321/j.issn:1000-758X.2007.05.011 [20] MEIER L, TANSKANEN P, HENG L, et al. Pixhawk: a micro aerial vehicle design for autonomous flight using onboard computer vision[J]. Autonomous Robots, 2012, 33(1): 21–39. doi: 10.1007/s10514-012-9281-4 [21] 王文奎, 石柏军. 低速风洞洞体设计[J]. 机床与液压, 2008, 36(5): 93–95.WANG W K, SHI B J. The design of low speed wind tunnel[J]. Machine Tool & Hydraulics, 2008, 36(5): 93–95. [22] 张运波. PWM信号的软件实现方法[J]. 微计算机信息, 2002, 18(10): 46–47, 50. doi: 10.3969/j.issn.1008-0570.2002.10.021ZHANG Y B. The software implementation method of PWM signal[J]. Control & Automation, 2002, 18(10): 46–47, 50. doi: 10.3969/j.issn.1008-0570.2002.10.021 [23] ALLEN M. Autonomous soaring for improved endurance of a small uninhabitated air vehicle[C]//Proc of the 43rd AIAA Aerospace Sciences Meeting and Exhibit. 2005: 1025. doi: 10.2514/6.2005-1025 [24] CHEN J, SHI Z W, ZHOU M B, et al. Modeling and simulation of UAV static soaring based on multi-hole probe[J]. AIP Advances, 2021, 11(7): 075309. doi: 10.1063/5.0055276 [25] LAWRENCE F, MILLS B. Status update of the AEDC wind tunnel Virtual Flight Testing development program[C]//Proc of the 40th AIAA Aerospace Sciences Meeting & Exhibit. 2002: 168. doi: 10.2514/6.2002-168 [26] COCHRANE J. MacCready theory with uncertain lift and limited altitude[J]. Technical Soaring, 1999, 23: 88–96. -









 点击查看大图
点击查看大图
计量
- 文章访问数: 168
- HTML全文浏览量: 51
- PDF下载量: 16
- 被引次数: 0






